Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
We were asking the question of how to plan energy efficient paths through strong and uncertain disturbances, such as ocean currents and wind fields. I developed the EESTO algorithm and demonstrated the benefits of this algorithm in both simulation and the field using a Platypus Lutra autonomous boat. In the image below you can see the paths the Lutra took on the surface of a lake in the presence of a wind field. In the field trials I tested three different planning methods. Note that the vehicle started in the upper middle (blue star) and moved to the lower middle (red square). First, we used a baseline method called Naive which ignored the wind during planning. Next we used a Replan method which started with no knowledge of the wind field but would replan as it gathered information about the wind. Lastly, we used an Oracle method which started with a map of the wind on the lake from a previous survey that day and would then replan with respect to the new information about the wind gathered during execution. 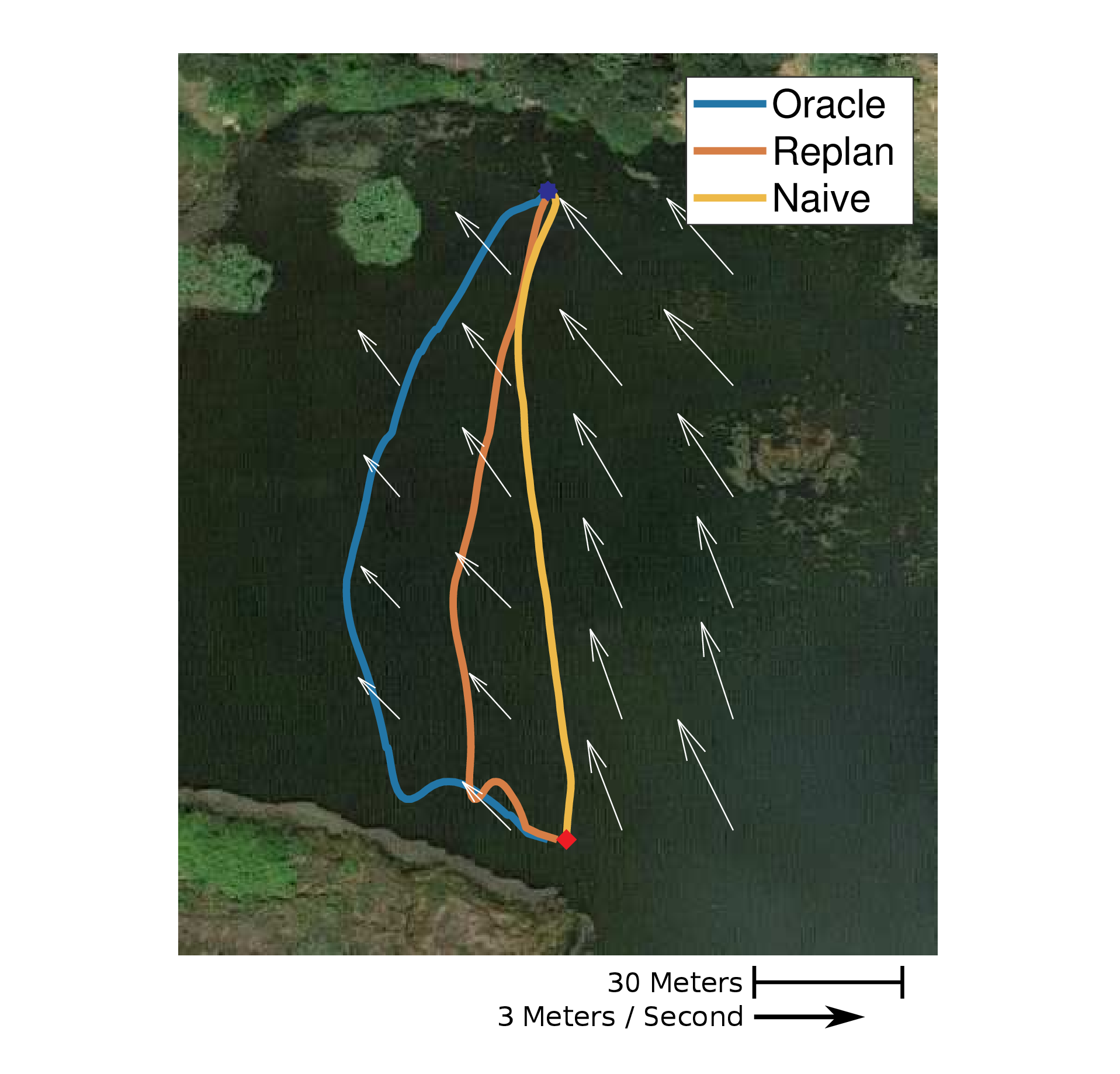
We were interested in examining how to plan for vehicles with low actuation relative to the disturbances in the environment. I developed a Stochastic Gradient Ascent (SGA) algorithm to plan for this class of vehicle. Additionally, we were interested in how we could use a team of these vehicles to gather information over large time and distance scales. The image below shows an illustration of what our algorithm planned over a simulated information field (yellow is higher information) of the Gulf of Mexico. The yellow vehicle is able to use the currents to move from an area of low information into an area of high information while the red vehicle was swept away from high information by the currents. Our algorithm enabled vehicles to leverage the currents to find more information. 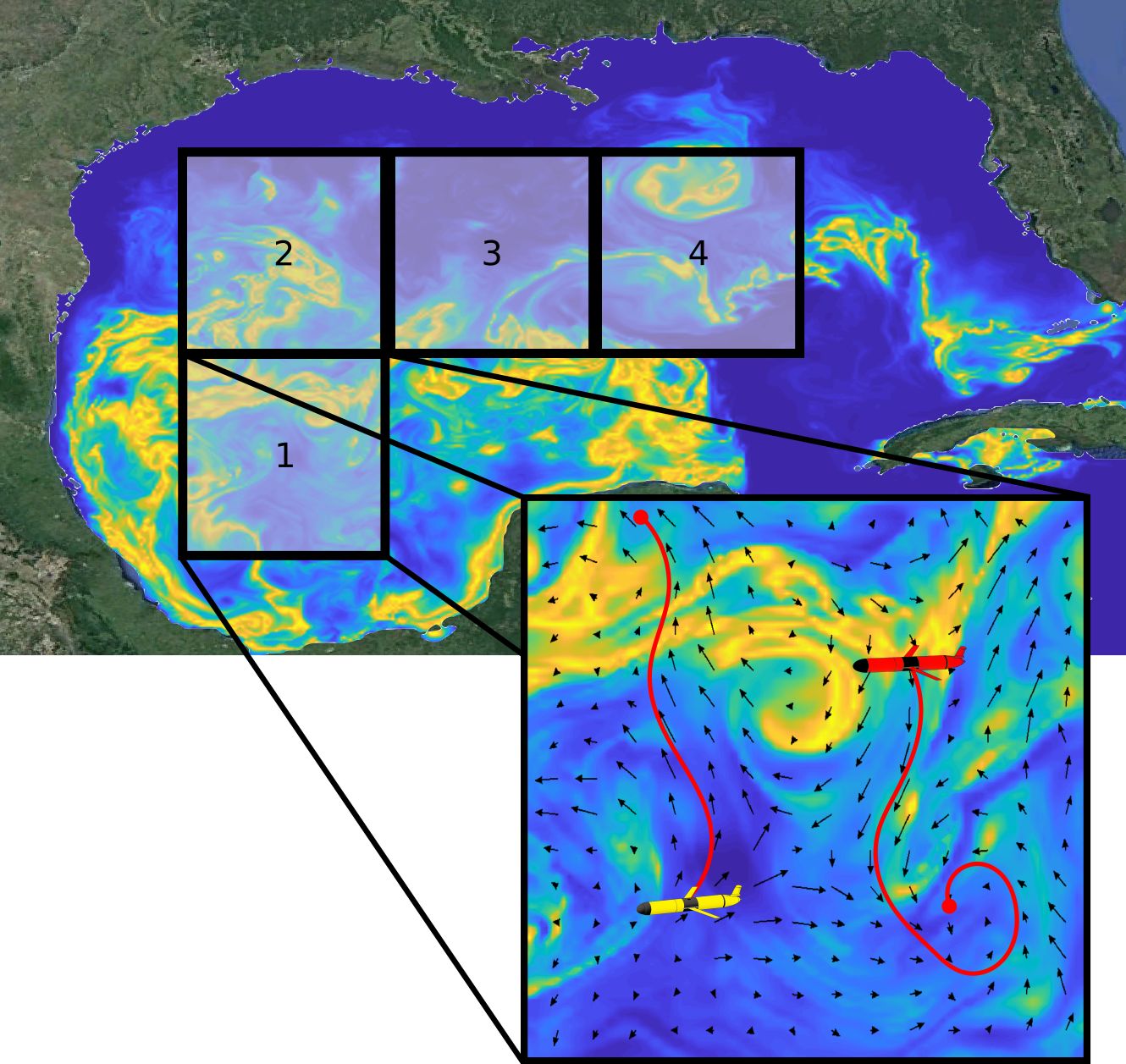
We were interested in decreasing the distance between the path that the robot plans and the path that the robot executes. As a first step we developed a Reinforcement Learning (RL) framework to find a policy that reduces the distance between the planned and executed path. I am currently working on folding this back into the planning to allow the robot to plan initial paths that are more realizable. Below you can see the results for the policies found by the framework on an automous boat. I performed 3 different patterns on the surface of the lake and compared our policy based method (cyan) to a default waypoint controller (blue). As can be seen our policy based method reduced the distance between the planned (red - dashed) and executed path. Additionally, the policy was able to remove the undesired looping behavior seen in the Information (3rd) path. 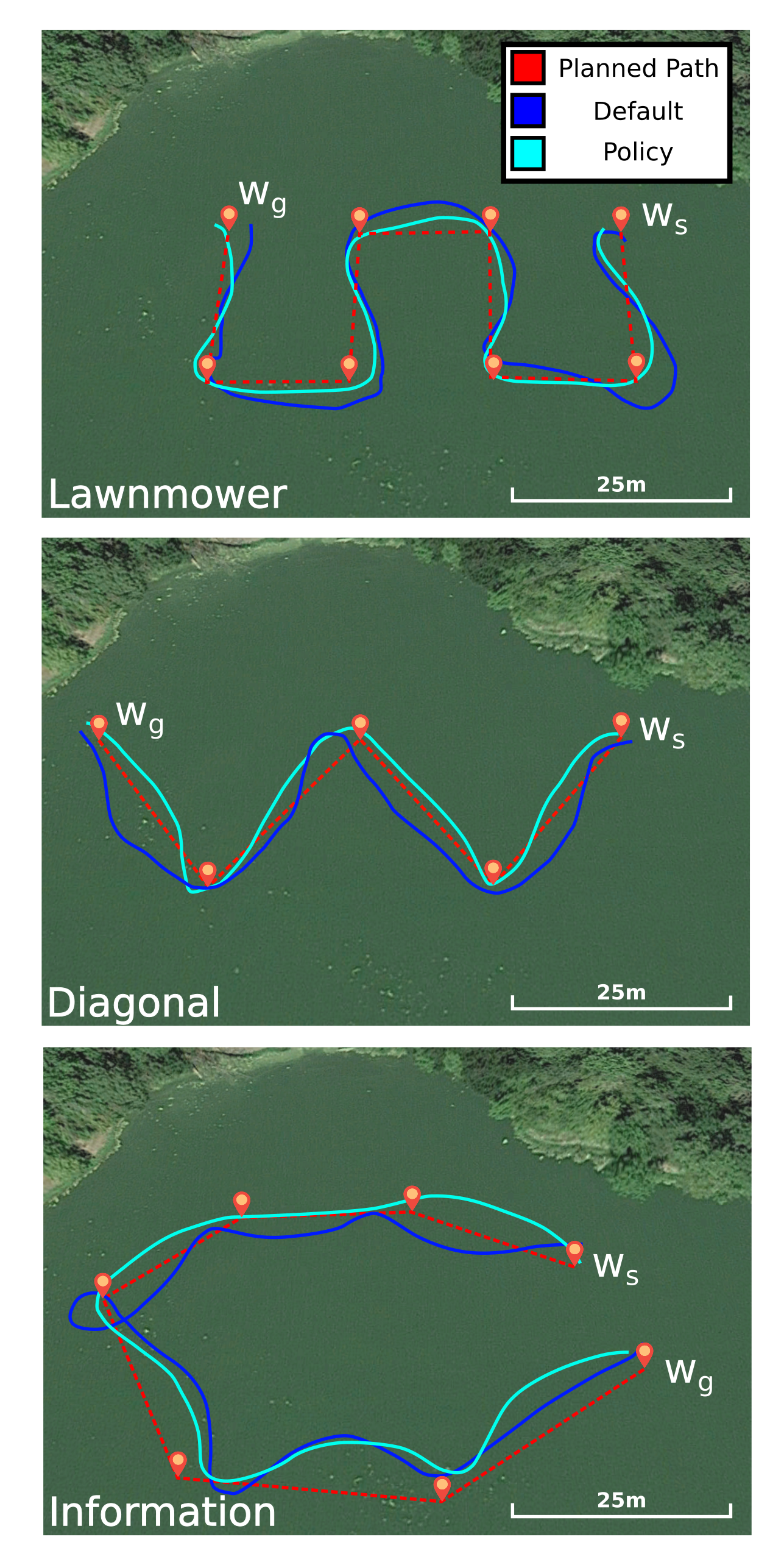
Published in Proc. IEEE International Conference on Robotics and Automation Workshop on Marine Robot Localization and Navigation (ICRA), 2016
We present the design overview and results for an offshore deployment of a semi-autonomous underwater vehicle (sAUV)
Recommended citation: N. Lawrance, T. Somers, D. Jones, S. McCammon and G. Hollinger, "Ocean deployment and testing of a semi-autonomous underwater vehicle," in Proc. IEEE International Conference on Robotics and Automation Workshop on Marine Robot Localization and Navigation (ICRA), Stockholm, Sweden, May 2016. http://research.engr.oregonstate.edu/rdml/sites/research.engr.oregonstate.edu.rdml/files/02_lawrance_ocean-deployment-testing.pdf
Published in Proc. Robotics: Science and Systems Conference Workshop on Robot-Environment Interaction for Perception and Manipulation (RSS), 2016
We present an iterative optimization algorithm for path planning energy-efficient algorithms in ocean current.
Recommended citation: D. Jones and G. Hollinger, "Real-time stochastic optimization for energy-efficient trajectories," in Proc. Robotics: Science and Systems Conference Workshop on Robot-Environment Interaction for Perception and Manipulation (RSS), Ann Arbor, MI, June 2016. http://research.engr.oregonstate.edu/rdml/sites/research.engr.oregonstate.edu.rdml/files/real-time-stochastic_-planning-final.pdf
Published in Proc. IEEE/MTS OCEANS Conference, 2016
We present the design overview and navigation performance for an offshore deployment of a semi-autonomous underwater vehicle (sAUV).
Recommended citation: N. Lawrance, T. Somers, D. Jones, S. McCammon and G. Hollinger, "Ocean deployment and testing of a semi-autonomous underwater vehicle," in Proc. IEEE/MTS OCEANS Conference, Monterey, CA, Sept. 2016. http://research.engr.oregonstate.edu/rdml/sites/research.engr.oregonstate.edu.rdml/files/oceans_abstract_qpdf.pdf
Published in Robotics, 2017
We present a prototype robotic system for apple bin management.
Recommended citation: Y. Ye, Z. Wang, D. Jones, L. He, M. Taylor, G. Hollinger, and Q. Zhang, "Bin-dog: A robotic platform for bin management in orchards", Robotics, vol. 6, no. 2, article 12, May 2017 http://www.mdpi.com/2218-6581/6/2/12/html
Published in IEEE Robotics and Automation Letters, 2017
We present a framework for planning energy-efficient trajectories through strong and uncertain disturbances, such as ocean currents and wind fields.
Recommended citation: D. Jones and G. Hollinger, "Planning energy-efficient trajectories in strong disturbances" IEEE Robotics and Automation Letters, vol. 2, no. 4, pp. 2080-2087, Oct. 2017 https://ieeexplore.ieee.org/document/7959079/
Published in Biosystems Engineering, 2018
This paper is about how to coordinate different steering strategies for a system with four independent wheels in an orchard environment.
Recommended citation: Y. Ye, L. He, Z. Wang, D. Jones, G. Hollinger, M. Taylor, and Q. Zhang, "Orchard manoeuvring strategy for a robotic bin-handling machine," Biosystems Engineering, vol. 169, pp. 85-103, May 2018 https://www.sciencedirect.com/science/article/pii/S1537511016308571/
Published in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018
In this work, we present a Stochastic Gradient Ascent (SGA) algorithm for multi-vehicle information gathering that accounts for limitations on a vehicle’s control authority caused by external forces.
Recommended citation: D. Jones, M. Kuhlman, D. Sofge, S. Gupta, and G. Hollinger, "Stochastic optimization for autonomous vehicles with limited control authority," in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, Oct. 2018 http://research.engr.oregonstate.edu/rdml/sites/research.engr.oregonstate.edu.rdml/files/iros_18_final_v2.pdf
Published in Journal of Field Robotics (JFR), 2019
This field report presents an overview of the development and testing of a semi‐autonomous underwater vehicle (sAUV)
Recommended citation: N. Lawrance, R. DeBortoli, D. Jones, S. McCammon, L. Milliken, A. Nicolai, T. Somers and G. Hollinger, "Shared autonomy for low-cost underwater vehicles," Journal of Field Robotics, vol. 36, no. 3, pp. 495-516, May 2019
Published in In Review for IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020
In this work, we present a Self-Organizing Map (SOM) framework for discovering the underlying structure of an information field which enables local optimization algorithms to more likely converge to good extrema
Recommended citation: S. McCammon, D. Jones and G. Hollinger, "Topology-Aware Self-Organizing Maps for Robotic Information Gathering," Under Review for IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020
Published in Under Review in Journal of Ocean Engineering, 2020
In this work, we examine the problem of coordinating large teams of unmanned underwater vehicles with low levels of actuation using both policy and optimization based methods.
Recommended citation: M. Kuhlman, D. Jones, D. Sofge, G. Hollinger and S. Gupta, "Coordinating Underwater Vehicle Teams to Conduct Large-Scale Geospatial Tasks," Under Review in Journal of Ocean Engineering
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This section is under construction